

Advances in materials and manufacturing techniques are paving the way for small, powerful motors, supported by improved heat dissipation methods, which enable the combination of miniaturization and higher power output.
The integration of micromotors with IoT technology, which connects various devices (home automation, commercial, and industrial) to the internet, enables advanced control. Furthermore, the integration of sensors and communication technologies enables real-time monitoring and remote operation; in-depth analysis of the operating environment and load conditions allows automatic adjustment of motor parameters for optimal performance.
Even with micromotors, analyzing data collected during use enables predictive maintenance, identifying potential problems before they cause failure. This proactive approach ensures timely maintenance and reduces downtime.
Innovative manufacturing techniques, such as 3D printing, enable the creation of complex motor designs, and research is ongoing to minimize friction, further improving motor efficiency and durability. Micromotors are classified based on their operating principles and construction, offering different functions to choose from for a wide range of applications.
The types of commonly used micromotors are:
• DC motor – A general-purpose motor that converts electrical energy into rotary motion. Its simple structure and low cost make it suitable for a wide range of applications.
• Stepper motor – Rotates a specific number of degrees in response to a pulse signal; this makes it ideal for applications requiring precise positioning and speed control.
• Piezoelectric motor – works based on the piezoelectric effect. It is small and lightweight, but more importantly, it can generate minimal displacement, an ideal feature for applications requiring extremely high precision.
• Ultrasonic motor – uses ultrasonic vibrations to produce rotary motion. Extremely quiet, it offers precise control and does not generate electromagnetic waves.
Due to their compact size and low weight, micromotors can be easily installed in tight spaces while maintaining high energy efficiency thanks to low power consumption. With continuous technological advances, these motors now offer greater power and improved efficiency despite their smaller size. Furthermore, they operate quietly, ensuring a comfortable working environment, and offer stable performance over extended periods of use.
DC micromotors
Brushed DC micromotors use mechanical brushes (typically carbon) to supply current to rotating coils via a commutator. They are inexpensive and simple to use, but require maintenance because physical contact causes friction, noise, and wear over time. Their common uses include toys, small appliances, and automotive systems.
Brushless DC (BLDC) micromotors replace mechanical brushes with electronic commutation via a motor driver. They offer much longer life, good efficiency, and quiet operation, making them ideal for high-performance applications such as drones, medical equipment, and precision instruments.
The previous two categories classify them based on the commutation system, but they can also be classified by rotor type.
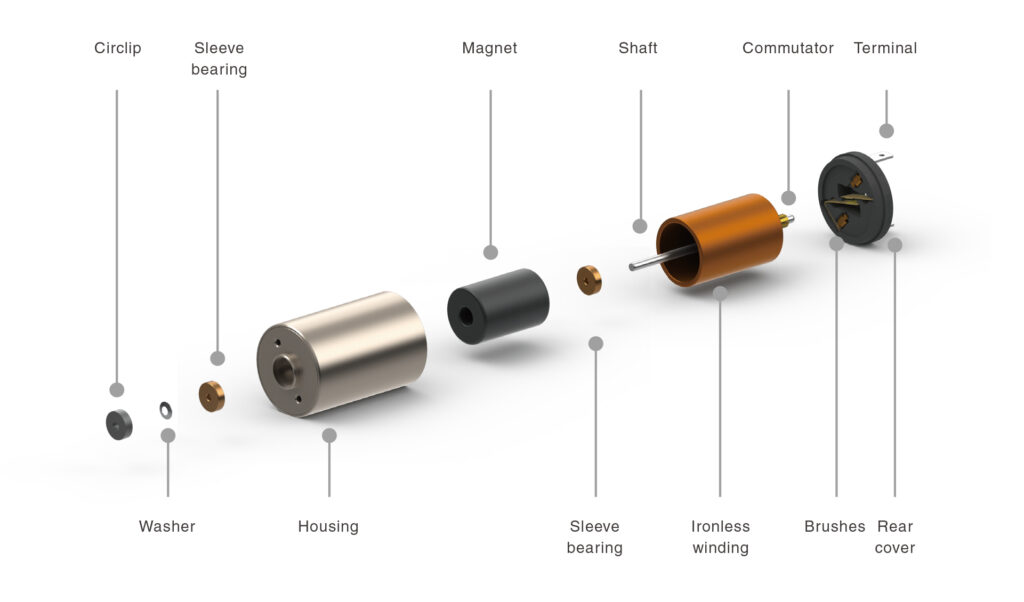
In iron-core micromotors, the rotor consists of copper windings around a laminated iron core. The iron concentrates the magnetic flux, ensuring high torque density and long life. However, they are heavier and prone to cogging.
Iron-coreless micromotors feature a lightweight, self-supporting copper winding, devoid of an iron core. Thanks to the rotor’s extremely light weight, they can start and stop almost instantly, offering excellent acceleration and smooth, cogging-free rotation. They are particularly popular for precision instruments and robotics.
There are also geared DC micromotors, in which a standard motor is integrated with a reduction gear (helical or planetary gears) to increase output torque while reducing speed. They are suitable for applications requiring controlled speed and power (e.g., cameras).
Servo micromotors are a complete system that includes a motor (brushed or brushless), an encoder for position feedback, and a control circuit to maintain a specific angle or speed.
Stepper motors
Microstepper motors are compact electromechanical devices designed for high-precision movement in extremely small spaces. While they offer a good torque-to-weight ratio, they are generally best suited for low-power, moderate-speed applications.
Typically defined by diameters less than 20 mm (ideal for portable electronics), these motors convert electrical pulses into discrete mechanical movements, enabling precise positioning without the need for a closed-loop feedback sensor.
They operate with an open-loop system, meaning they can accurately maintain a specific position until the load exceeds the motor’s maximum torque.
Standard step angles (often 1.8° or 0.9°) can be further refined using microstepping technology, which electrically divides complete steps into up to 256 discrete increments using a specialized driver. Microstepping is a technique capable of increasing resolution by dividing a single 1.8° step into very small substeps (for example, 0.007°). It should be noted that while it may slightly reduce the incremental torque of the motor, it does not necessarily improve its physical precision, only its resolution.
Benefits include reduced noise and vibration; the cogging and ringing effects typical of full-step operation are minimized. This is a key benefit for environments requiring quiet operation.
Cogging is a position-dependent phenomenon caused by the physical interaction between the rotor’s permanent magnets and the stator. It is the “clicking” sensation felt when rotating a motor when it is turned off, which persists even with microstepping. Ringing is a dynamic, speed-dependent phenomenon in which the rotor overshoots the target position and oscillates (bounces) back and forth before settling. It occurs most frequently at low speeds or at the end of a movement.
Piezoelectric micromotors
Piezoelectric micromotor technology is based on the inverse piezoelectric effect, the ability of certain materials (such as ceramics or crystals) to mechanically deform when subjected to an electric field. They are a type of solid-state actuator that generates motion through high-frequency vibrations, rather than magnetic fields or electromagnetic coils. These micromotors work by resonating a stator at ultrasonic frequencies (typically >20 kHz), creating elliptical movements on the surface that actuate a rotor or slider via frictional contact. Submillimeter motors often use helical-cut stators to couple axial and torsional resonant modes, improving small-scale performance.
In these motors, an alternating voltage causes rapid deformation of the piezoelectric materials; these deformations are amplified by resonance, creating traveling or standing waves that actuate the motor, which consists of a stator (resonator) and a rotor (slider). The friction created between them transmits motion. Because resonance is sensitive to temperature and load, modern designs use self-oscillating circuits to maintain the optimal frequency (typically 20–100 kHz) and maximize efficiency.
Piezo-walk motors use multiple piezoelectric elements that move along a surface in a clamp-and-push sequence. The piezo-walk motor (or walking drive) is a type of linear piezoelectric actuator that simulates walking to move a slider (runner) with extreme precision. Unlike traditional motors, a pair of actuators extends to grip the slider via friction; the actuators flex laterally, moving the slider forward. As a second actuator takes control, the first retracts and returns to its original position. Cyclic repetition of these steps allows for linear motion (with potentially unlimited distances) while maintaining nanometer resolution. It can perform steps in the nanometer range (down to <1 nm in microstep mode) and when not powered, the motor maintains its position mechanically without consuming energy, ensuring extremely high stability. Despite their small size, these motors can generate significant thrust forces (up to several tens of Newtons). Being a direct drive without gears or screws, they have no mechanical backlash.
Stick-slip inertial electric micromotors are high-precision devices that exploit the difference between static and dynamic friction to generate microdisplacements. They are widely used in nanotechnology due to their nanometer resolution and simple structure. The movement is based on a repetitive two-phase cycle, typically driven by a sawtooth electrical signal applied to a piezoelectric element.
In the stick (adhesion) phase, the piezoelectric voltage slowly increases, causing the actuator to gradually expand. Thanks to static friction, the slider (the moving part) adheres to the actuator, and the two move in unison.
In the slip phase, the voltage is interrupted or abruptly reversed, causing the actuator to rapidly contract. Due to its inertia, the slider is unable to follow this sudden movement and remains almost stationary in its new position while the actuator returns to its base.

The two technologies, piezo-walk and stick-slip, differ radically in their operating principle, force exerted, and cost.
Stick-slip (inertial) uses a single piezo actuator that acts on a moving element (runner) via friction. Piezo-walk is a stepper motor that uses multiple piezo actuators (at least two pairs) that work in concert. Stick-slip is ideal for applications where space is limited and budgets are limited, such as focusing miniature lenses, simple micro-manipulation, or one-time fine adjustments.
Piezo-walk is used in industrial and research applications requiring high forces and absolute stability, such as semiconductor lithography and high-resolution scanning microscopy.
Both motors are self-locking when not powered, meaning they maintain their position without consuming energy.
Ultrasonic motors
All ultrasonic motors are piezoelectric motors, but not all piezoelectric motors are ultrasonic motors.
In fact, ultrasonic micromotors and piezoelectric micromotors are not exactly the same thing; an ultrasonic motor is a specific, high-frequency subcategory of piezoelectric motors. Although all ultrasonic motors use piezoelectric materials to generate motion, not all piezoelectric motors operate in the ultrasonic frequency range. Both are frequently used in microapplications due to their compact, lightweight, and high-precision nature. They often offer self-locking capabilities, meaning they maintain their position even in the absence of power, unlike traditional electromagnetic motors.
Both use piezoelectric materials, such as lead zirconate titanate (PZT), to convert electrical energy directly into motion. Ultrasonic motors use high-frequency vibrations (greater than 20 kHz) to create traveling waves on a stator that drives a rotor. They are known for their high torque, low speed, and quiet operation (for example, they are common in camera autofocus).
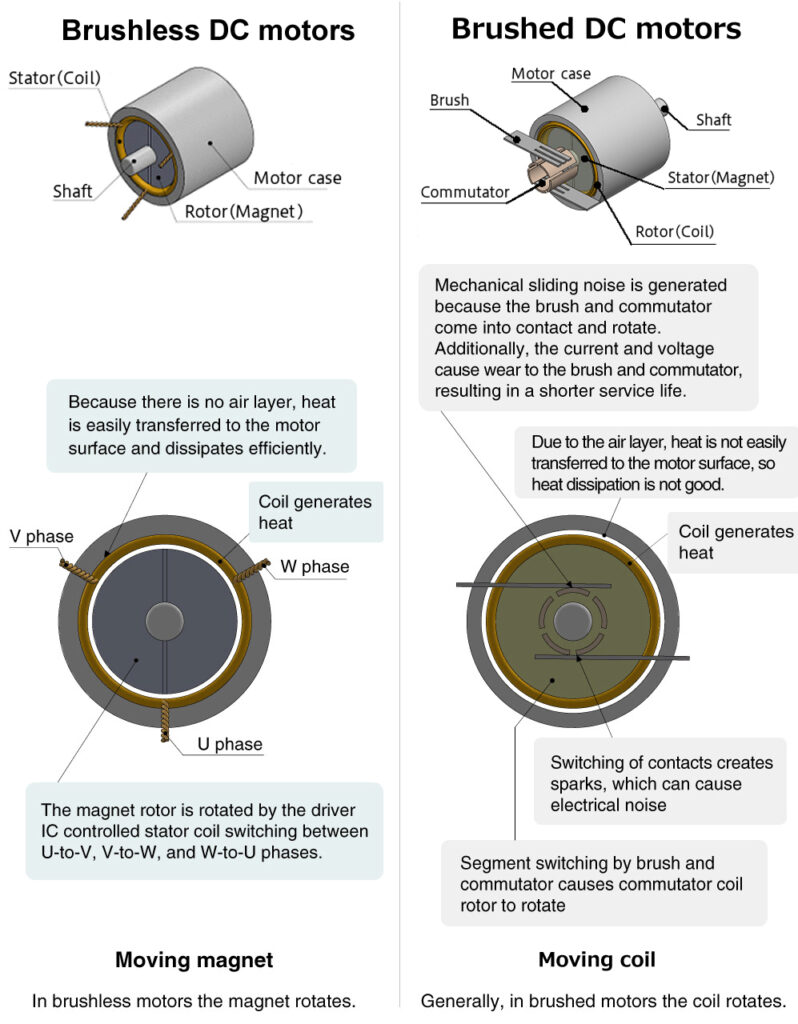
However, unlike a brushed motor, which can be operated simply by connecting it to a power source, a brushless motor requires a control circuit to operate. The choice of the appropriate control circuit depends on whether the motor has a sensor that detects the rotor position.




{kind=link}